#Video_45 🔧 Let’s Talk SDV Foundations: BSW, Adaptive AUTOSAR & Hypervisors 🧠🚗
In a Software Defined Vehicle, the real magic happens beneath the surface—at the foundation layer. Here’s a breakdown:
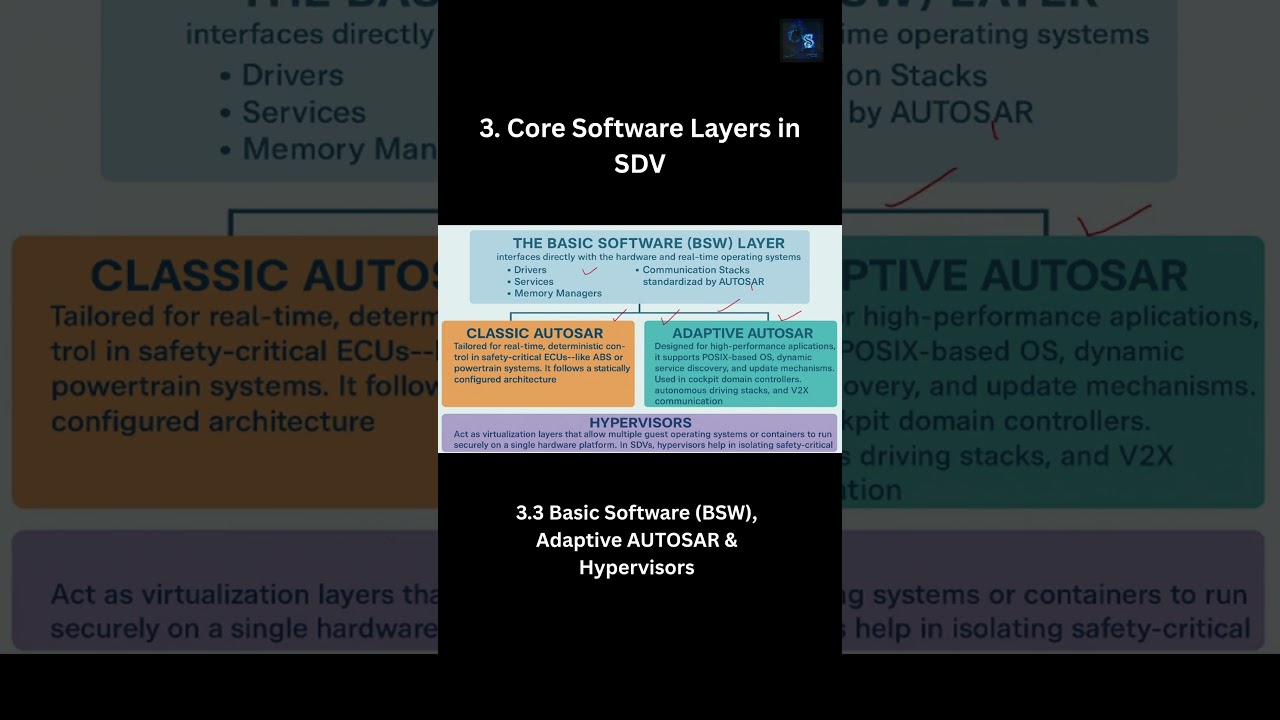
⚙️ Basic Software (BSW):
This is the low-level layer that directly interacts with hardware. It includes essential drivers, services, memory handlers, and communication stacks that keep the system running.
🧱 Adaptive AUTOSAR:
Unlike Classic AUTOSAR, which was rigid and static, Adaptive AUTOSAR is dynamic and service-oriented—designed for High-Performance Computers (HPCs) in modern vehicles.
✅ Supports over-the-air updates
✅ Enables real-time data processing
✅ Perfect for ADAS and autonomous functionalities
🧰 Hypervisors:
These allow multiple operating systems (like Linux and QNX) to run securely and independently on the same hardware.
Example: Run an infotainment system (Linux) and safety-critical application (QNX) side by side—on a single chip, without cross-interference.
🔒 Why it matters?
Together, these layers make SDVs modular, updatable, secure, and intelligent—paving the way for next-gen mobility solutions.
#SDV #SoftwareDefinedVehicles #AUTOSAR #AdaptiveAUTOSAR #Hypervisor #BSW #EmbeddedSystems #AutomotiveSoftware #InVehicleArchitecture #ConnectedCars #MobilityTech #AutomotiveInnovation #ECUDesign #AutomotiveSecurity #HPC #RealTimeSystems #VehicleArchitecture #NextGenVehicles

Comments