同期式シリアルインタフェース, by Wikipedia https://ja.wikipedia.org/wiki?curid=2347861 / CC BY SA 3.0
#物理層プロトコル
同期式シリアルインターフェース(どうきしきシリアルインターフェース、Synchronized Serial Interface, SSI)は、工業用途として使用されるマスター(たとえば、コントローラ)とスレーブ(たとえば、センサ)間のシリアルインターフェースの標準として広く使用されている。
SSIはRS422を基本としており、センサ製造メーカ間で非常に信頼が厚く、各種のハードウエア間の実施に加えて高いプロトコール効率を持っている。
SSIはアブソリュートエンコーダの位置情報を送信をするために1984年にMax Stegmann GMBHで初めて開発された。
公式には、1990年に特許が切れたドイツ特許DE34 45617で網羅されていた。
信頼性、堅牢差を要求される厳しい工業環境下で測定する機器の通信に優れている。
SSIはデジタルデータ通信用の同期、Point to Point(4線式全2重)、シリアル通信チャネルである。
同期データ通信はクロック信号を使用して、受送信の終端で送信を同期させ、データを送信するものである。
スタートとストップのビットが存在しないので、多くのメッセージビット通信バンド幅の使用を可能にし、全体の通信プロセスを簡単に簡素化できる。
図1.SSI Point to Point(4線式全2重)の通信 一般的には、前述したように、マスタ(たとえば、PLC、μコントローラ)からスレーブ(たとえば、ロータリエンコーダ)のPoint to Point接続を考えるとよい。
マスタはクロックシークエンスをコントロールし、スレーブはシフトレジスタを通して、そのときのデータ/値を送信する。
マスタによって励起されたとき、データはシフトレジスタから排出され終了する。
マスタとスレーブはコントローラのクロックによって同期している。
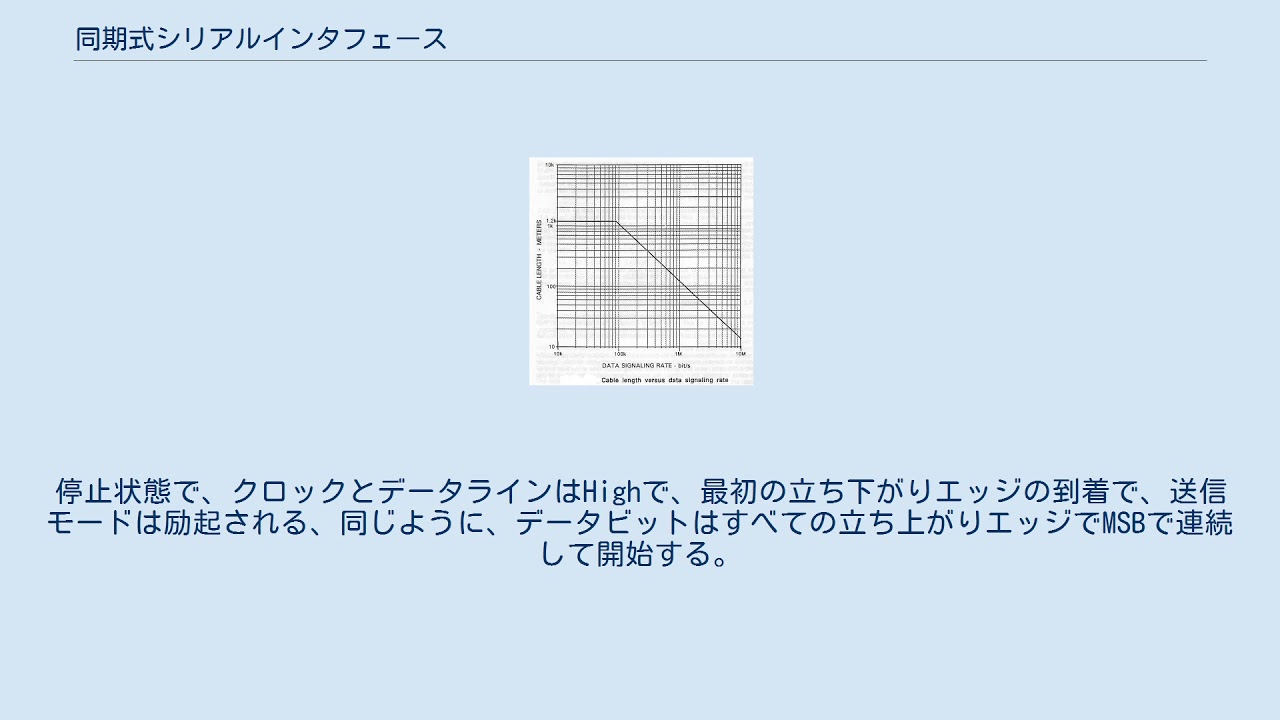
クロックとデータ信号はRS422に従って通信される。
RS422はANSI/TIA/EIA-422としてよく知られており、平衡電圧デジタルインターフェース回路の電気特性を規定する技術標準でもある。
データは平衡、または作動信号を使用して、送信される。
また、クロックとデータ線は基本的にはツイストペア線が使用される。
入力はRS-422/485によって生じるガルバニック絶縁(詳細は「3」を参照下さい。)に対してOPTO-COUPLER が使用される。
センサからのデータ出力はRS422/485ラインドライバで行われる。
差動信号は電磁域(EMI)に強く、それ故、厳しい外部環境、長距離伝送の使用に対し信頼性が高い。
インターフェースは上記の図に示すように、非常に簡単なデザインである。
2対のペア線からなり、1対はマスタからのクロック信号を送信し、残りの1対はスレーブからのデータを送信する。
クロックシークエンスが必要なときにはマスタからトリガーが発信される。
相違するクロック周波数は100KHzから2MHzまでの範囲で使用できる。
クロックパルスの数は送信されるデータビット数による。
最も簡単なSSIスレーブインタフェースはセンサの現在値に停止するため再取り込みのできる単安定マルチバイブレータ(monoflop)を使用する。
スレーブの停止した現在値はシフトレジスタに保存され、これらの値はコントローラによって励起されたとき、排出されて終了する。
この設計はインターフェースに使用されるμコントローラ、FPGA、ASICの向上により、現在も改善されている。
データフォーマットはデータの適切な通信を確保するため次のように設計されている。
データ通信のプロトコールは3つのパート(Leading-”1″ -」 Data-Bits -」 Trailing-“0″)から成り立っている。
フォーマットの最重要点はインターフェースを適切に稼働させることであり、ハードウエア、またはソフトウエアのエラーから通信データを守ることである。
停止状態で、クロックはハイレベルにあり、センサ出力もまた、ハイレベルにある。
それゆえ、電線の非接触状態を検知するのに使用される。
これはインターフェスの適切な稼働状況を監視するのに役立つ。
nクロックパルス(立ち上がりエッジ)のあと、データは完全に送信される。
次のクロックパルス(立ち上がりエッジ n+1)でセンサ出力はケーブルの短絡検知を行うローレベルに移行する。
n+1の後、ハイレベルであれば、次に、インターフェースが短絡状態はいる。
複数のスレーブ(最大3個まで)か…


Comments