ROS Toolboxを活用することでMATLABおよびSimulinkをROSおよびROS2と容易に連携するができます。
ROS (Robot Operating System)は移動ロボットや自動運転、ロボットアーム、ドローンなどの様々な自律システムで活用されているロボット向けソフトウェアプラットフォーム(ミドルウェア)です。ROSは従来、研究開発、プロトタイピングの用途が大半でしたが、ROS2のリリースによってリアルタイムシステムへの適用や製品開発への展開が期待されています。
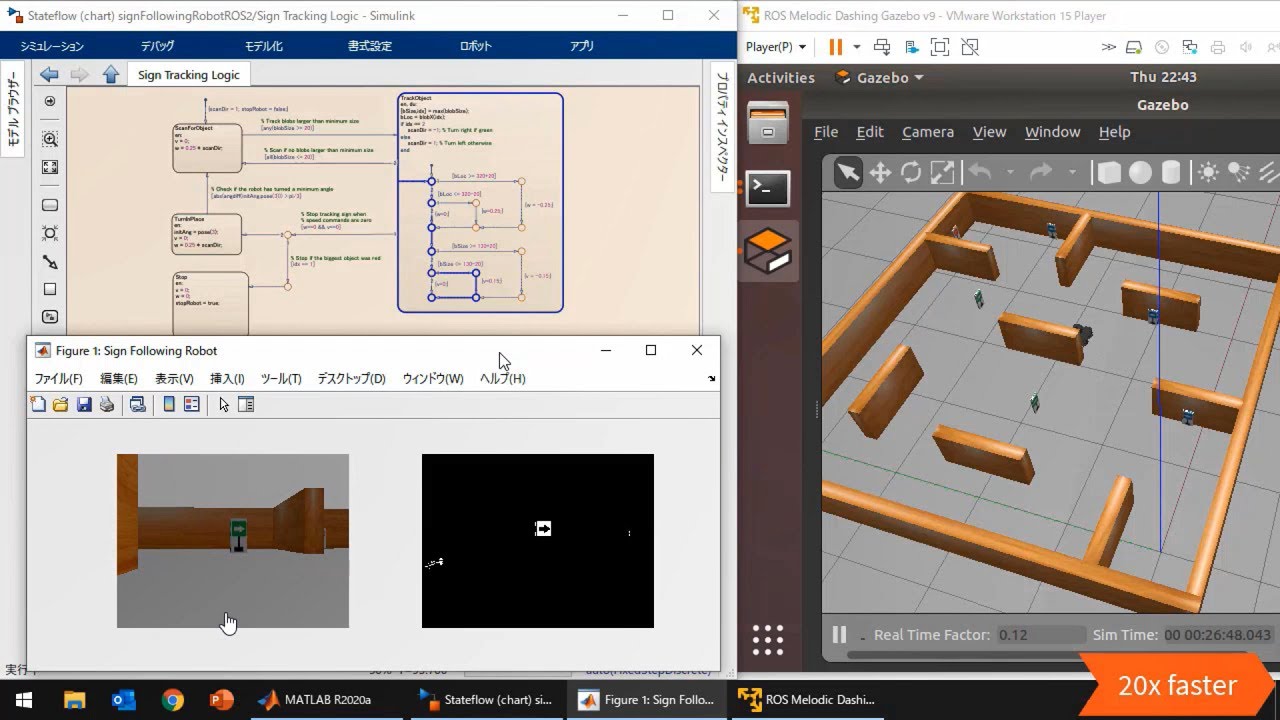
本動画では、ROS Toolboxの概要や、ROSおよびROS2連携によるMATLABおよびSimulinkによる自律ロボットシステム開発のワークフローについてご紹介いたします。
・ROS / ROS2 の概要
・ROS / ROS2 ネットワークへの接続 (topic/service/action)
・ROS / ROS2 を介したGazeboシミュレーターや実機との連携
・rosbagの読み込みと可視化、解析
・ROS / ROS2 C++ノードの生成とcatkinおよびcolconでのビルド
※ROS ToolboxはRobotics System ToolboxからR2019bでROS機能が分割されてリリースされた製品です。ROS2の機能は分割後のROS Toolboxに追加となった機能です。
– MATLABについて: https://bit.ly/2qqoOIR
– Simulinkについて: https://bit.ly/388Ysfn
– MathWorks製品一覧: https://bit.ly/38jFoNc
– MathWorksソリューション一覧: https://bit.ly/3ej86BO
– 無料2時間MATLABチュートリアルで学ぶ: https://bit.ly/3kTP5a8
– MATLAB無料評価版を入手する: https://bit.ly/33PlRPv
– MATLABとSimulinkの最新バージョンをチェックする: https://bit.ly/2rWZ7js
#移動ロボット #ロボットアーム #ドローン
© 2021 The MathWorks, Inc. MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand names may be trademarks or registered trademarks of their respective holders.

Comments